
�Pע�ٷ���ƽ�_
�@ȡ������Ϣ



һ���O�����
������һ�N���ڴ惦Һ�w����w��������������ʯ�͡���������Դ���ИI���ڃ����O�^���У��ڃ����ӳ��ͺ��]ˮ/��ˮԇ��Ȉ����У����ރȱڕ����M�������P�g������Ӱ푺���Ͷ�ϻ������Ϳ�������Ҫ�M�г��P��
�������ڃ��ij��P�������ͨ�^�˹�ʹ��늄ӹ����C��ĥ���C�����ރȱ��M�й�������ĥ����ȥ�����ރȱڵ��P�g�ӣ�ȱ�c��ʩ���^������Ҫ��_�ּܣ����ʩ���������L���˹��߿����I����һ���İ�ȫ�[�����ڄӏ��ȴ�����ҪͶ��������˹�����ĥЧ�������˹����IӰ푣��|������R���ۉm��Ⱦ���أ��U�ϼ��ۉm�ռ��y�ȴ�Ȇ��}��
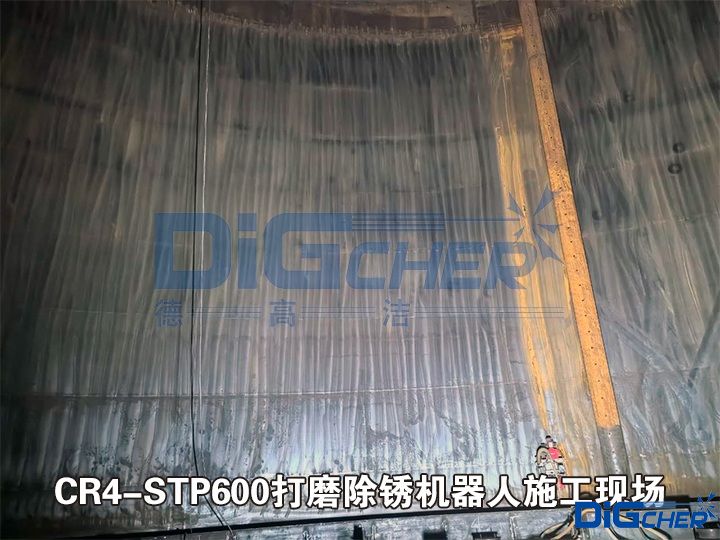
�b�ڴˣ�ᘌ����½��ރȲ��Ĵ�ĥ���Pʩ�����¸ߝ������аl��Ͷ��ʹ����һ��CR4-STP600��ĥ���P���ڙC���ˣ�ʩ���r�H���˹��ֳ��b�����������ڙC������ɸ߿����I���o����d�_�ּܣ��������˹��߿Չ���İ�ȫ�[����

�¸ߝ�CR4-STP600��ĥ���P���ڙC���ˌ���ĥ���P�b�á����I���m�b�á����ڙC���˼���һ�w�������ڙC���˴��d��ĥ���P�b�����I����ĥ���P�^������������m�b�ÿ�ͬ������ĥ�����P�g�ۉmȫ�����ߣ��ڴ��ʹ��I���m���з��x��̎����ȫ�^�̭h���o�ۉm��
�����O��M��
1�����ڙC����
���ڙC���˲�������������݆ʽ�Ƅӷ�ʽ���ɴ��d120 kg�������܉��������������w���棬���F�`���ǰ�M�����ˡ��D���Ȅ�����������һ��������Խ�����������`������ޱ���ĺ��p����r��
2����ĥ���P�b��
�������ރȲ����H��r�����������Ĵ�ĥ���P�b�ã����ϴ�ĥ���PЧ����
3�����I���m�b��
����������m���g����՚����������Ԏ��坍�^�V��ϵ�y�����a���ďU�Ϻͷۉm�M�л��գ����F��ĥ�^�̟o�m����
4���[�әCе��
���Դ��d�[�әCе�ۣ��Cе���ϴ��d��ĥ���ߣ���߅�����ֲ���ĥ̎����
5����ȫ�����C��
���I�r�Ɍ�ʩ�B�Ӱ�ȫ�����C��������ʩ���r�߿Չ����¼��İl�������ϙC����ʩ����ȫ��
�����O�䃞��
1�����P��

�C���������\���£�������ĥ�y�׳̶�30-40 m²/h��4500 m²ʩ�������AӋ30~40�졣
2����ȫ����
�o���_�ּܣ������ˆT�߿����I�����L�U�����p��ʩ�����ڡ�
3���h������
�F��ʩ���^�̿ɲ��ù��I���m����ϣ��p�ٷۉm��Ⱦ��
4�����P��
����Ҫ�����_��ST3���P̎���ȼ���
�ġ����g����
������һ�N���ڴ惦Һ�w����w��������������ʯ�͡���������Դ���ИI���ڃ����O�^���У��ڃ����ӳ��ͺ��]ˮ/��ˮԇ��Ȉ����У����ރȱڕ����M�������P�g������Ӱ푺���Ͷ�ϻ������Ϳ�������Ҫ�M�г��P��
�������ڃ��ij��P�������ͨ�^�˹�ʹ��늄ӹ����C��ĥ���C�����ރȱ��M�й�������ĥ����ȥ�����ރȱڵ��P�g�ӣ�ȱ�c��ʩ���^������Ҫ��_�ּܣ����ʩ���������L���˹��߿����I����һ���İ�ȫ�[�����ڄӏ��ȴ�����ҪͶ��������˹�����ĥЧ�������˹����IӰ푣��|������R���ۉm��Ⱦ���أ��U�ϼ��ۉm�ռ��y�ȴ�Ȇ��}��
�b�ڴˣ�ᘌ����½��ރȲ��Ĵ�ĥ���Pʩ�����¸ߝ������аl��Ͷ��ʹ����һ��CR4-STP600��ĥ���P���ڙC���ˣ�ʩ���r�H���˹��ֳ��b�����������ڙC������ɸ߿����I���o����d�_�ּܣ��������˹��߿Չ���İ�ȫ�[����
�¸ߝ�CR4-STP600��ĥ���P���ڙC���ˌ���ĥ���P�b�á����I���m�b�á����ڙC���˼���һ�w�������ڙC���˴��d��ĥ���P�b�����I����ĥ���P�^������������m�b�ÿ�ͬ������ĥ�����P�g�ۉmȫ�����ߣ��ڴ��ʹ��I���m���з��x��̎����ȫ�^�̭h���o�ۉm��
�����O��M��
1�����ڙC����
���ڙC���˲�������������݆ʽ�Ƅӷ�ʽ���ɴ��d120 kg�������܉��������������w���棬���F�`���ǰ�M�����ˡ��D���Ȅ�����������һ��������Խ�����������`������ޱ���ĺ��p����r��
2����ĥ���P�b��
�������ރȲ����H��r�����������Ĵ�ĥ���P�b�ã����ϴ�ĥ���PЧ����
3�����I���m�b��
����������m���g����՚����������Ԏ��坍�^�V��ϵ�y�����a���ďU�Ϻͷۉm�M�л��գ����F��ĥ�^�̟o�m����
4���[�әCе��
���Դ��d�[�әCе�ۣ��Cе���ϴ��d��ĥ���ߣ���߅�����ֲ���ĥ̎����
5����ȫ�����C��
���I�r�Ɍ�ʩ�B�Ӱ�ȫ�����C��������ʩ���r�߿Չ����¼��İl�������ϙC����ʩ����ȫ��
�����O�䃞��
1�����P��
�C���������\���£�������ĥ�y�׳̶�30-40 m²/h��4500 m²ʩ�������AӋ30~40�졣
2����ȫ����
�o���_�ּܣ������ˆT�߿����I�����L�U�����p��ʩ�����ڡ�
3���h������
�F��ʩ���^�̿ɲ��ù��I���m����ϣ��p�ٷۉm��Ⱦ��
4�����P��
����Ҫ�����_��ST3���P̎���ȼ���
�ġ����g����
|
�O�䅢�� |
|
|
��̖ |
CR4-STP600 |
|
�ߴ�L*W*H |
1200×650×600 mm |
|
����(kg) |
150 |




